设置8级灰度色到16~23颜色表
支持芯片: SHMICTRL系列芯片 ESP32-S3系列
void gradbasecolor(int color,int m);
//color:基础颜色值,0~65535 RGB565格式
//m: =0 表示深色背景 =1 表示浅色背景示例
int i;
gradbasecolor(0xf800,1);
for (i=0;i<8;i++)
{ boxf(10,i*20,110,i*20+16,i+16);
}执行结果: 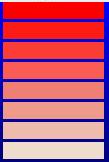
int i;
gradbasecolor(0xf800,0);
for (i=0;i<8;i++)
{ boxf(10,i*20,110,i*20+16,i+16);
}执行结果: 
注意
- RGB565格式是64位真彩的一种表现模式,即使用16bit二进制的一个值表示颜色,其中前5位为红色,中间6bit为绿色,后面5bit为蓝色
- 系统为了表示透明色,透明色使用了0xffff这个值,因此白色就只能使用次白色,即0xf7de,也就是RGB565的R\G\B三个值各减一的白色;
- 设置后 16号颜色为基础色,17~23为越来越浅的灰度色
- 此语句主要的功能给控件提供一个基础色变化的颜色编号体系